Real-time AI Framework
Along with the development of artificial intelligence technology, real-time algorithms for these AI need to be considered.
In particular, we are researching and developing real-time algorithms specialized for Deep Neural Networks that are often used in AI.
Our researches are focused on DNN optimization that guarantees real-time under limited resource situations, network reconfiguration using the characteristics of DNN, and more.
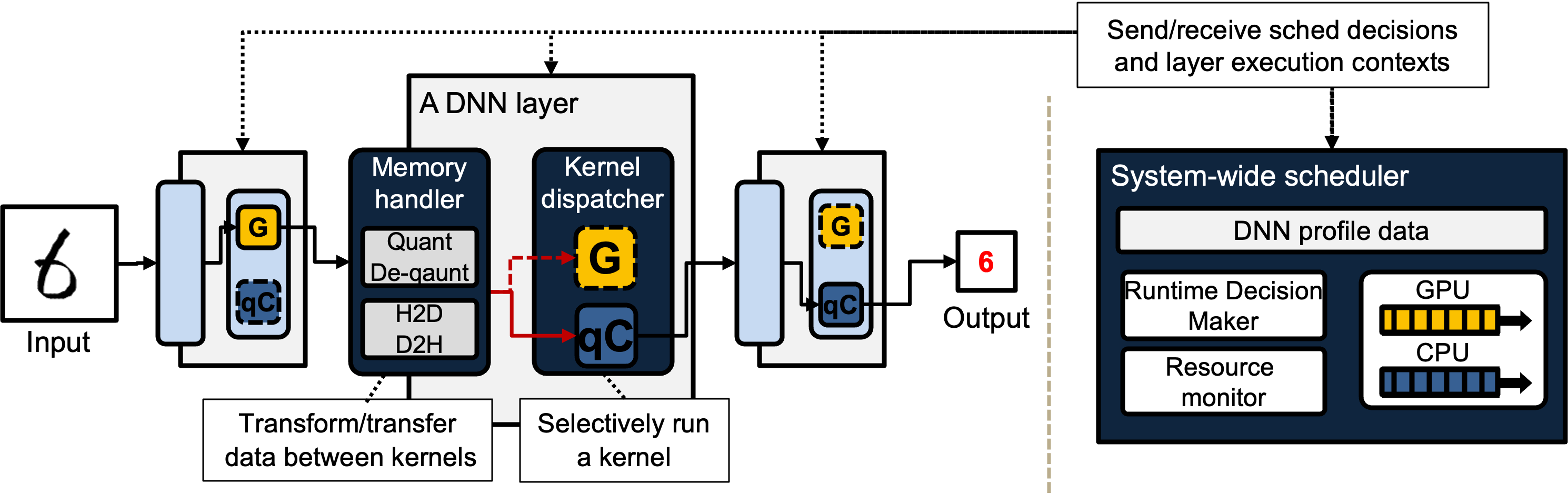
• LaLaRAND: Flexible Layer-by-Layer CPU/GPU Scheduling for Real-Time DNN Tasks (RTSS 2021)
In a situation where several DNNs under various types of computing (heterogeneous) resources, schedule them in player-granularity and allocate them to appropriate resources to achieve high accuracy and guarantee real-time.
• DNN-SAM: Split-and-Merge DNN Execution for Real-Time Object Detection (RTAS 2022)
According to the characteristics of DNN, an existing DNN structure can be changed, and real-time can be guaranteed through it.
In an object detection network, the importance of the entire image may not be the same. Therefore, we devised a new computational model, such as detecting important parts separately to retrieving results of the critical region quickly and accurately, and developing an algorithm to guarantee real-time.

Real-time I/O Services
Deep learning applications or artificial intelligence (AI) are gathering huge amount of data from multiple sensors. The size of data continues to grow.
A real-time guarantee for data I/O will be a crucial factor for establishing a safe hard real-time system.
We're assuming Solid State Drive (SSD) as a real-time storage medium due to it's beneficial features.
By modeling the unique I/O patterns and considering multiple tradeoffs of SSD, we're researching into real-time I/O service using SSD.
• Dynamic Chip Clustering and Task Allocation for Real-time Flash (DAC 2021)
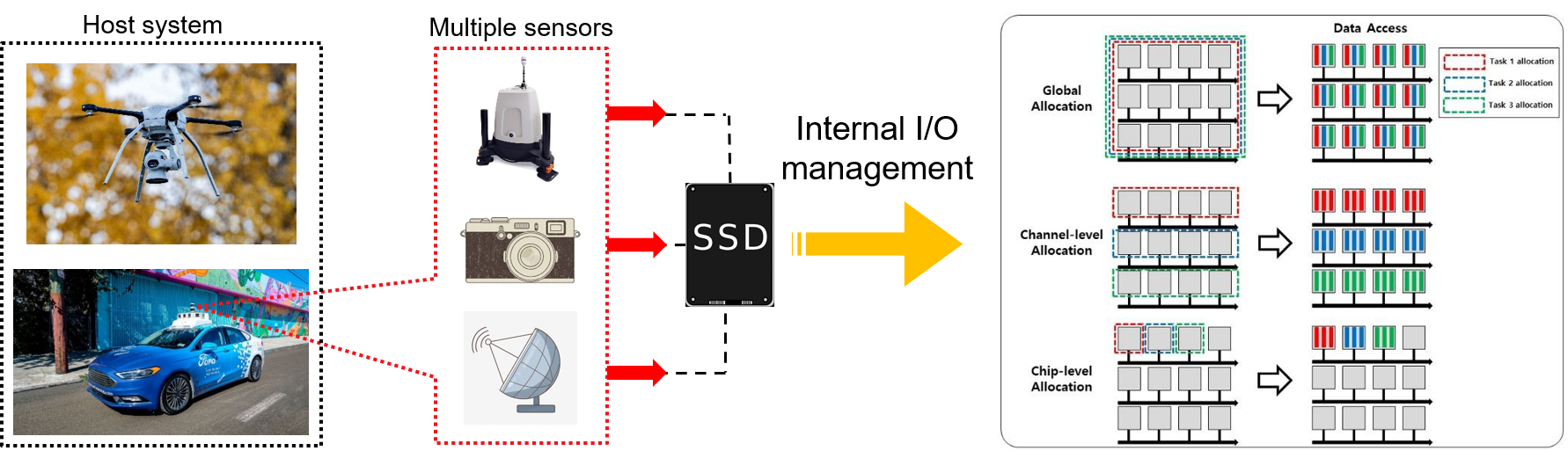 SSDs are made up of multiple chips, and the processing time differs depending on which chip and how to read and write data. Therefore, we are solving this task-to-chip allocation problem to handle real-time I/O.
SSDs are made up of multiple chips, and the processing time differs depending on which chip and how to read and write data. Therefore, we are solving this task-to-chip allocation problem to handle real-time I/O.
• State-aware Real-time Flash Storage
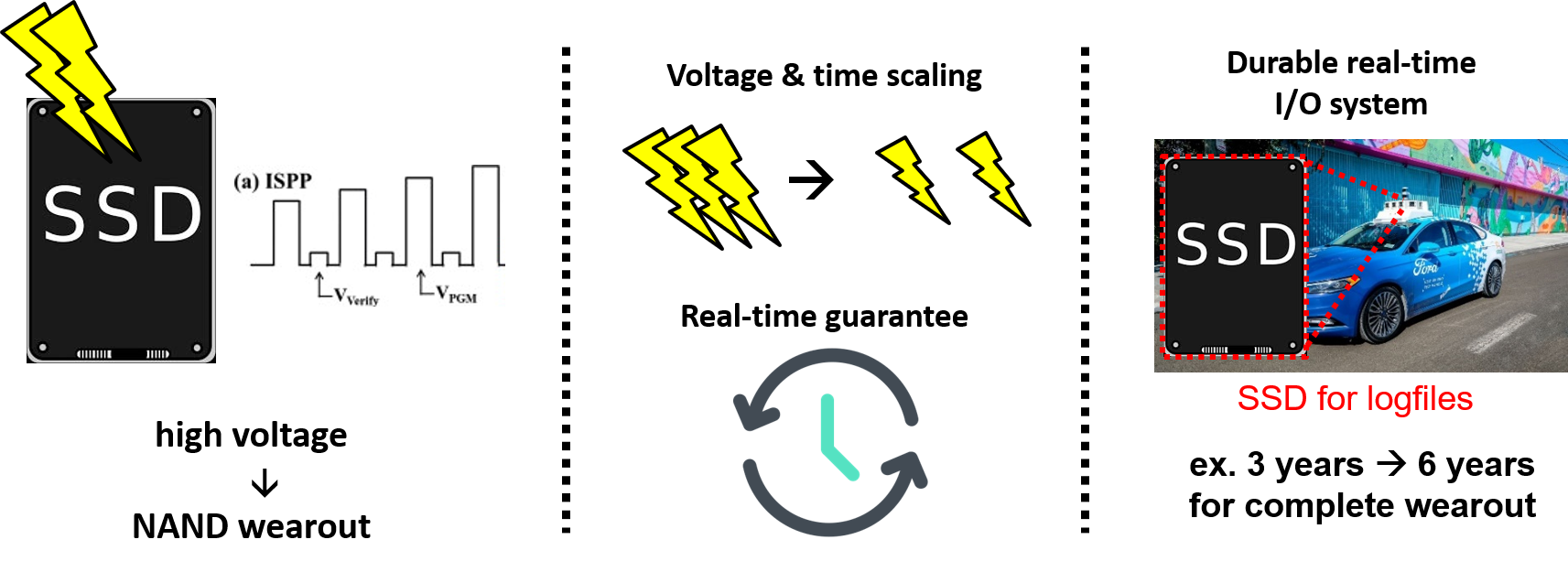
NAND chips have a wearout problem. This is particularly affected by how much write and erase operations occur on a single chip. More important thing is that execution time of read, write and erase changes as a flash cell wears out. Therefore, real-time flash systems require a wearout(state)-aware I/O handling mechanisms to guarantee every request to be completed within deadline, considering execution time difference on chip of different ages.
Real-Time Computing Framework for Autonomous Driving
ROS (Robot Operating System) is the middleware that provides development tools and various libraries to develop robot application programs.
• Real-time guarantees on ROS2
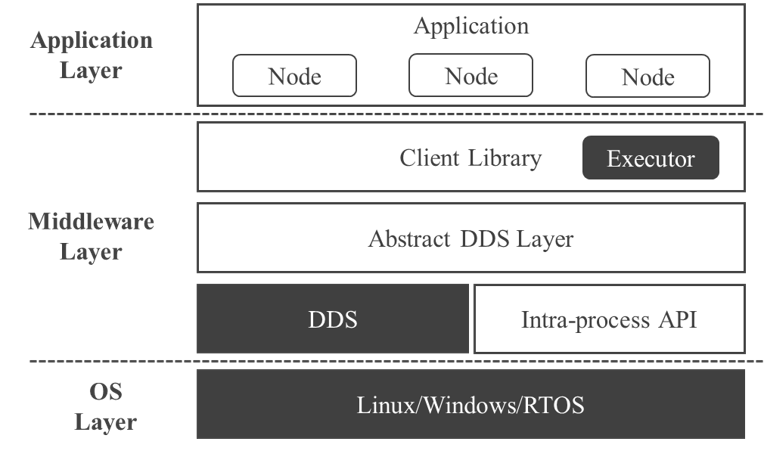
In robotic systems, including autonomous vehicles, tasks must be executed using limited resources within the dealine to avoid accidents. To support real-time, we research respoense time analysis and resource allocatio on ROS.
• Fault-tolerance Mechanisms on ROS2
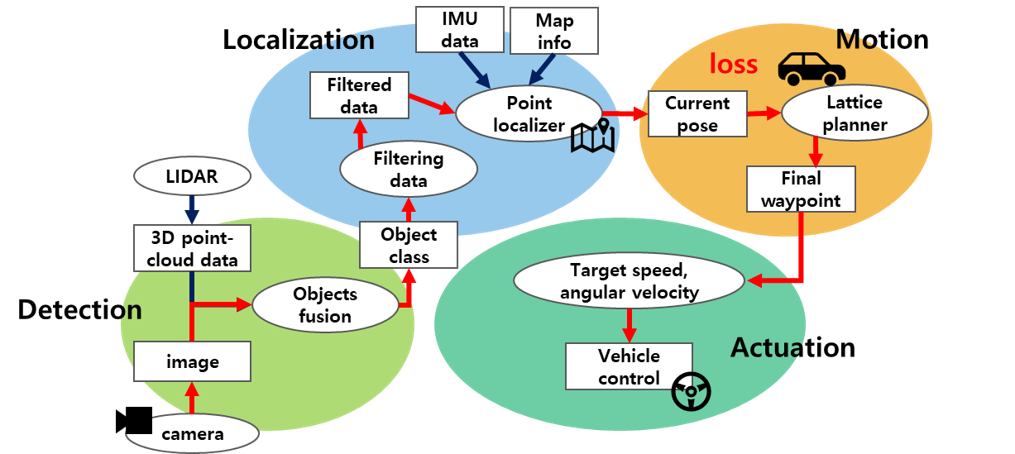
ROS is designed to enhance modularity which is suitable for safety-critical systems composed of many software packages. To support system reliability in safety-critical applications, we research the fault-tolerant scheduling algorithm for handling loss on ROS.
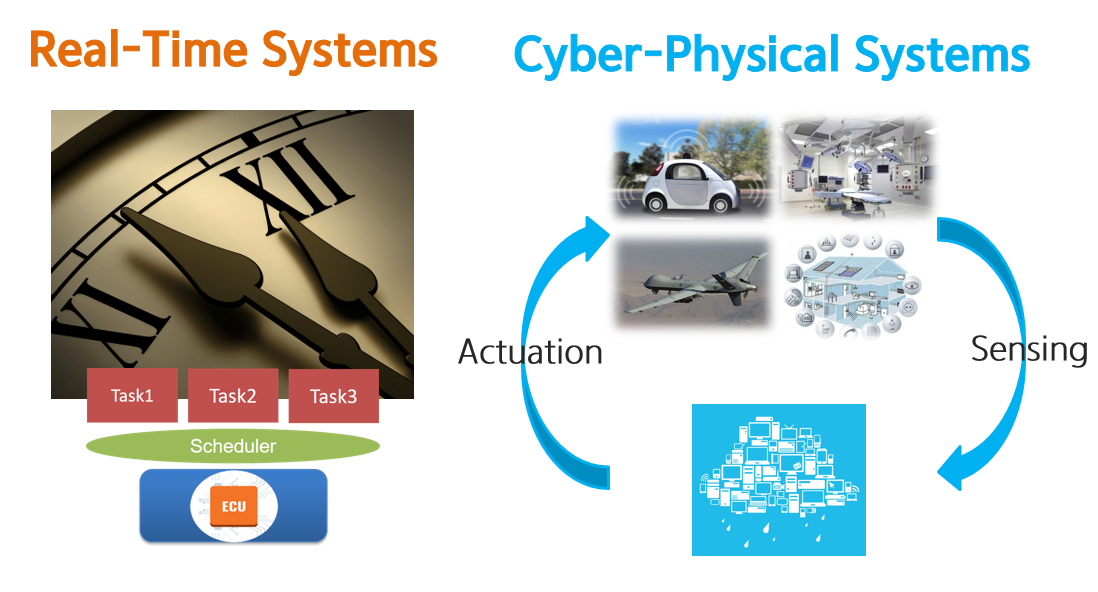
Adaptive Resource Management for Cyber-Physical Systems
Cyber-physical System (CPS) covers all of a variety of applications, such as an application using ethernet. For these CPS environments, we are researching new scheduling techniques and also a technique to cope with possible problems in real-time.
• Real-time Scheduling
• Real-time scheduling in uni-processor, multiprocessor, and heterogeneous-core systems (e.g., big.LITTLE)
• Real-time multi-GPU scheduling
• Mixed-criticality scheduling
• Real-time control for cyber-physical systems
• Physical-state Aware Adaptive Cyber Resource Management
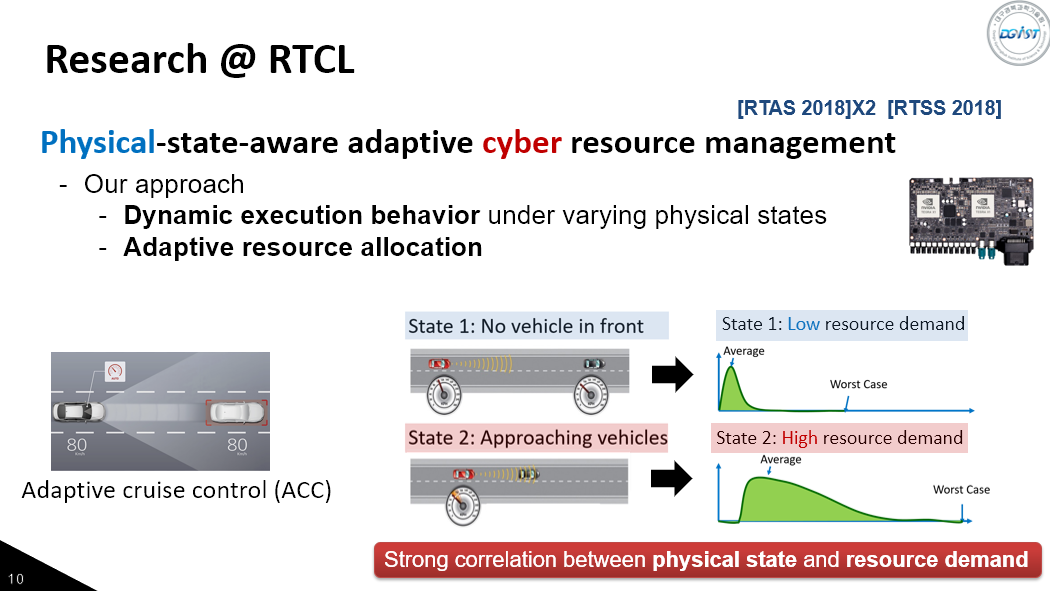
• Dynamic execution behavior under varying physical states
• Adaptive resource allocation
• Fault-Resilient Real-Time Ethernet Communication
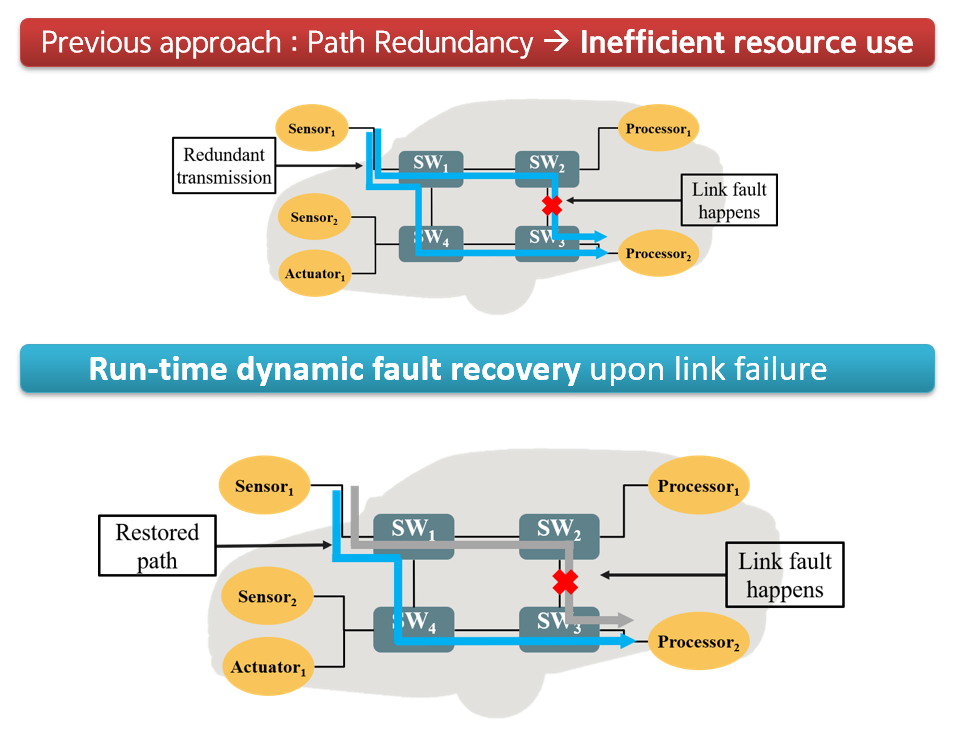
• Run-time dynamic fault recovery upon link failure